For the project, an array microphone was temporarily fitted to the red FROG so that it could pick up questions asked by visitors to the museum. Due to the high noise levels they encountered the, otherwise successful, project used a Wizard-of-Oz set-up to answer questions. The results of the project will help in the further development of the R3D3 receptionist robot.
Although they are now all working on different projects, Randy and Jan keep in touch with Noé via Skype and Facebook and, sometimes, after office hours they still find time to work together on one of their favourite FROG robots.
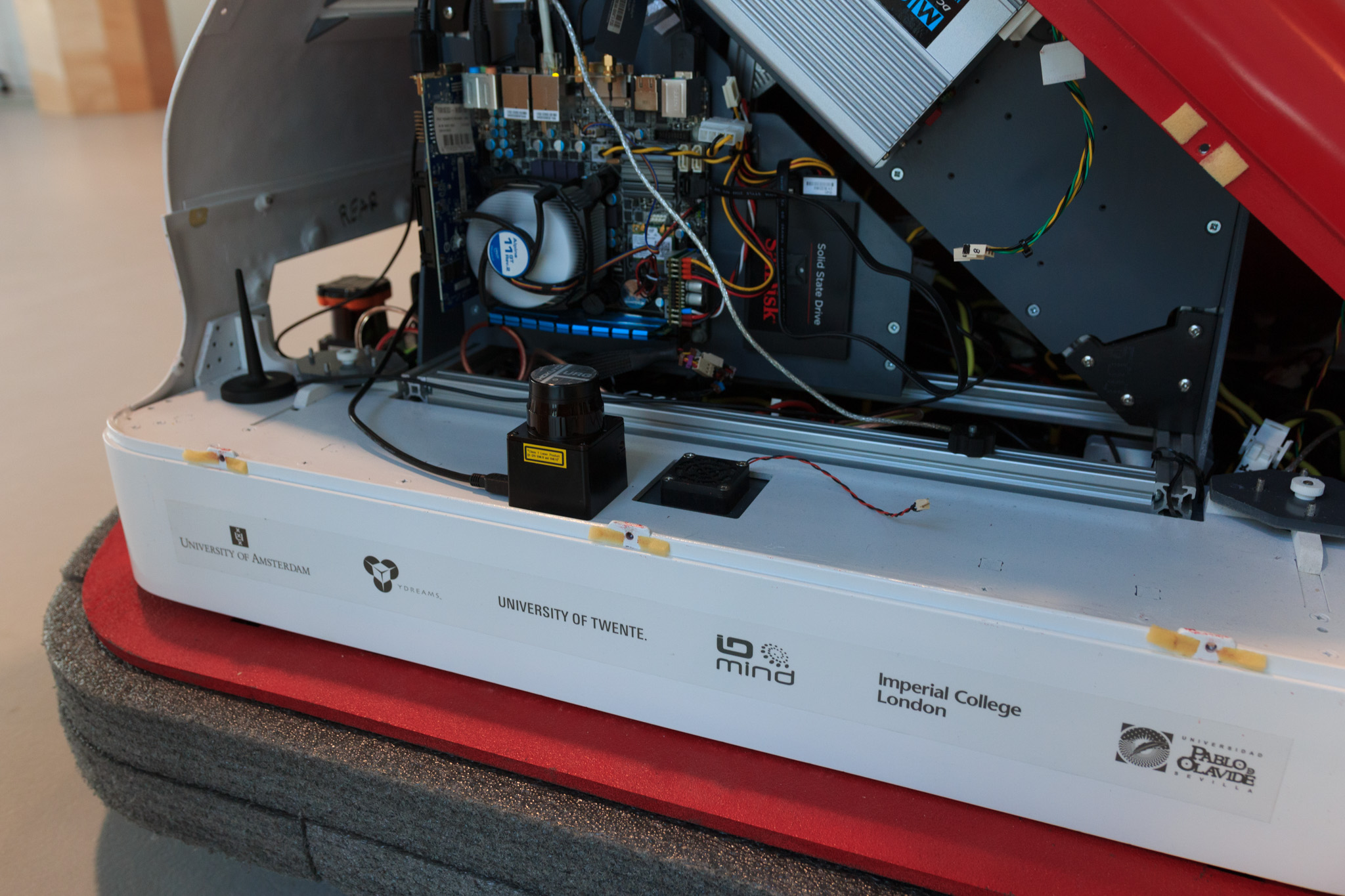
Recently Jan and Randy fitted 2 extra lasers to cover some blind spots at the sides to FROG – this meant they had to make holes in the shell (shhh ….. nobody tell Paulo!).
The extra lasers allow protoFROG (aka the Campus Robot) to navigate better through spaces and some corners inside its new seasonal home, the DesignLab.
There, HMI Masters‘ students are using FROG as a platform for researching receptionist robots as part of the R3D3 project (part of the Dutch national COMMIT program).
FROG has appeared on tweakers.net a Dutch website featuring news and information about hardware, software and the Internet. Members of the UT team explained and demonstrated the various capabilities of the robot. You can find the clip (which is in Dutch) here: FROG on tweakers.net
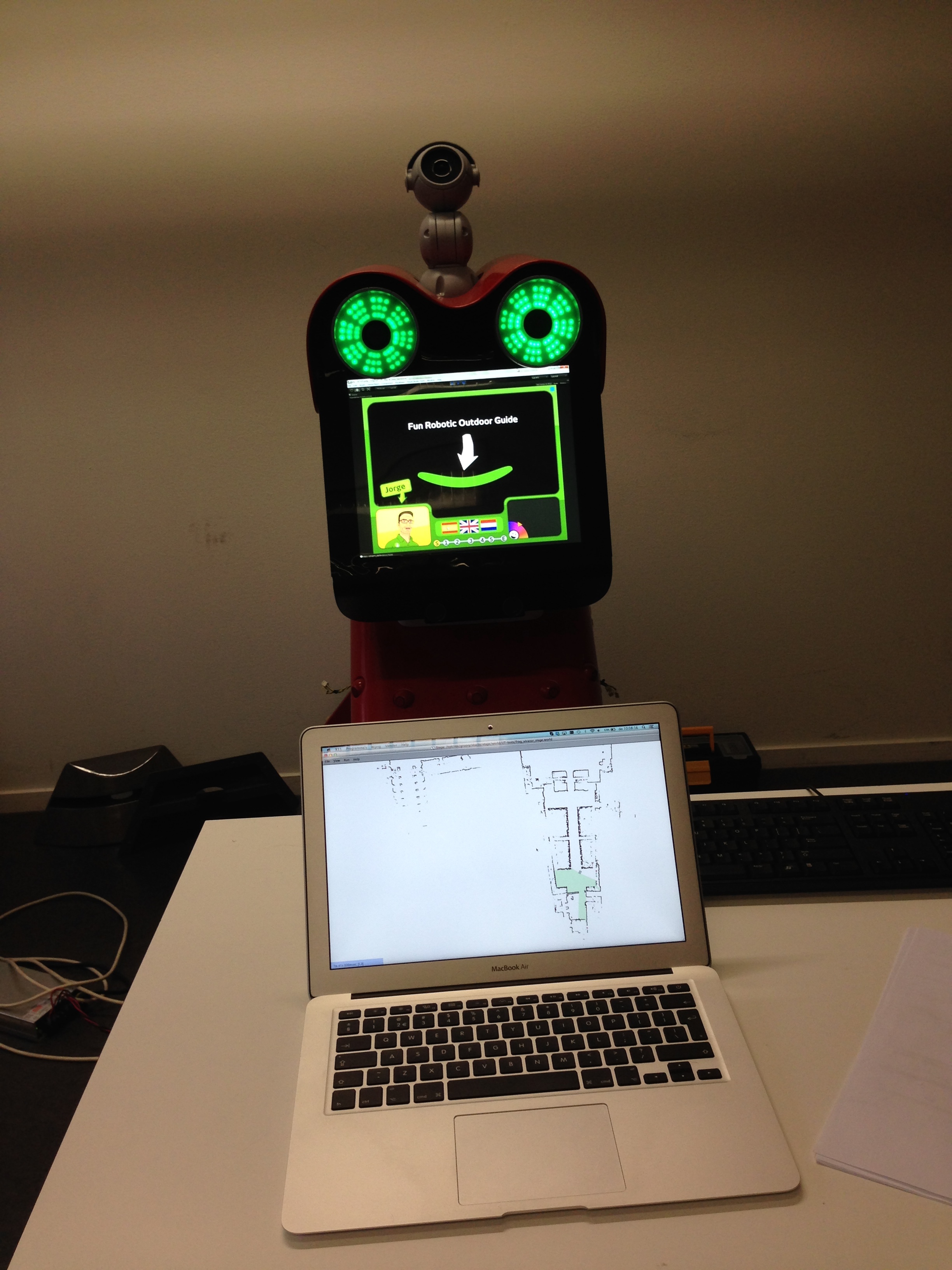
This week the guys from UT are using UPO’s simulation environment on the protoFROG (the UT Campus robot) to test some new features for guiding missions.
From the 15 to the 26 of September, FROG (the green one) will be running these missions for experiments and evaluation tests at the Royal Alcázar in Seville. Unlike this simulation, the FROG will actually be driving around to run its missions.
UPO simulator running on a laptop. The robot is showing its content relevant to the location that the simulator has reached.The simulation setup. As you can see, the robot isn’t going anywhere. And, the researchers have recently been working late and have forgotten to take out the empties. Fortunately the pizza boxes had disappeared.
The UT Campus robot is having some problems at the Hannover Messe. On the first day it drove around until lunchtime but now protoFROG is at a standstill. This is an outdoor robot with a lot of traction power and the loose-laid carpet is causing the motors to overheat during rotation. Although, by the look of it there is not always that much room to manoeuvre, anyway.
The FROG robot was defined to run outdoors, specifically for the EU project in the Lisbon Zoo and in the Royal Alcázar in Sevilla. As the robot must not only navigate the various terrains at these sites but also be able to turn on the spot the project has been having some difficulties with their choice of tires. What would you choose for a 100 kilo robot that has to handle clean-swept tarmac and paving, either of which may later be strewn with olive stones from the trees. This is the terrain in the Lisbon zoo – and the robots mission also includes some inclines and ramps. Then move the same robot to Sevilla where it has to go from neat paved courtyards onto tiled or marble floors.
And in the past two weeks, protoFROG has had to cope with gravel strewn tarmac, TV studios, and now, loose-laid carpet. That’s a lot to deal with for a prototype.
Yesterday, FROG co-ordinator Vanessa Evers took protoFROG the UT’s Campus robot and a group of young researchers to Amsterdam to appear in the Pauw & Witteman late-night talk show. You can find the interview here – in Dutch. And here is some behind-the-scenes footage – also in Dutch.
We have just heard from IDMind that the Campus robot (aka protoFROG) is all ready to be shipped to the Netherlands where it will take part in a very special ceremony. A few days later it will travel on to the Hannover Messe.
Here we can see Paulo Alvito, an important member of the FROG consortium, reflected in the touchscreen of the proto-FROG. This was taken in March 2014 – IDMind had just completed the configuration of the UT Campus robot ready for the Hannover Messe.
protoFROG is actually the UT Campus robot. It is a prototype of the FROG robot with demos of some of the functionalities that are being developed in the FROG project.
The protoFROG will be at the Hannover Messe on the stand from Monday 7 April to Wednesday 9 April.
A collaborative project under the FP7-ICT-2011.2.1 Cognitive Systems and Robotics (a), (d) area of activity.
 In June 2016, students from the UT took the Campus robot to the NEMO Science Museum in Amsterdam. They were using the red FROG as a robot platform to demonstrate their project work, part of the R3D3, the Rolling Receptionist Robot with Double Dutch Discourse project.
In June 2016, students from the UT took the Campus robot to the NEMO Science Museum in Amsterdam. They were using the red FROG as a robot platform to demonstrate their project work, part of the R3D3, the Rolling Receptionist Robot with Double Dutch Discourse project.