Although they are now all working on different projects, Randy and Jan keep in touch with Noé via Skype and Facebook and, sometimes, after office hours they still find time to work together on one of their favourite FROG robots.
Recently Jan and Randy fitted 2 extra lasers to cover some blind spots at the sides to FROG – this meant they had to make holes in the shell (shhh ….. nobody tell Paulo!).
The extra lasers allow protoFROG (aka the Campus Robot) to navigate better through spaces and some corners inside its new seasonal home, the DesignLab.
There, HMI Masters‘ students are using FROG as a platform for researching receptionist robots as part of the R3D3 project (part of the Dutch national COMMIT program).
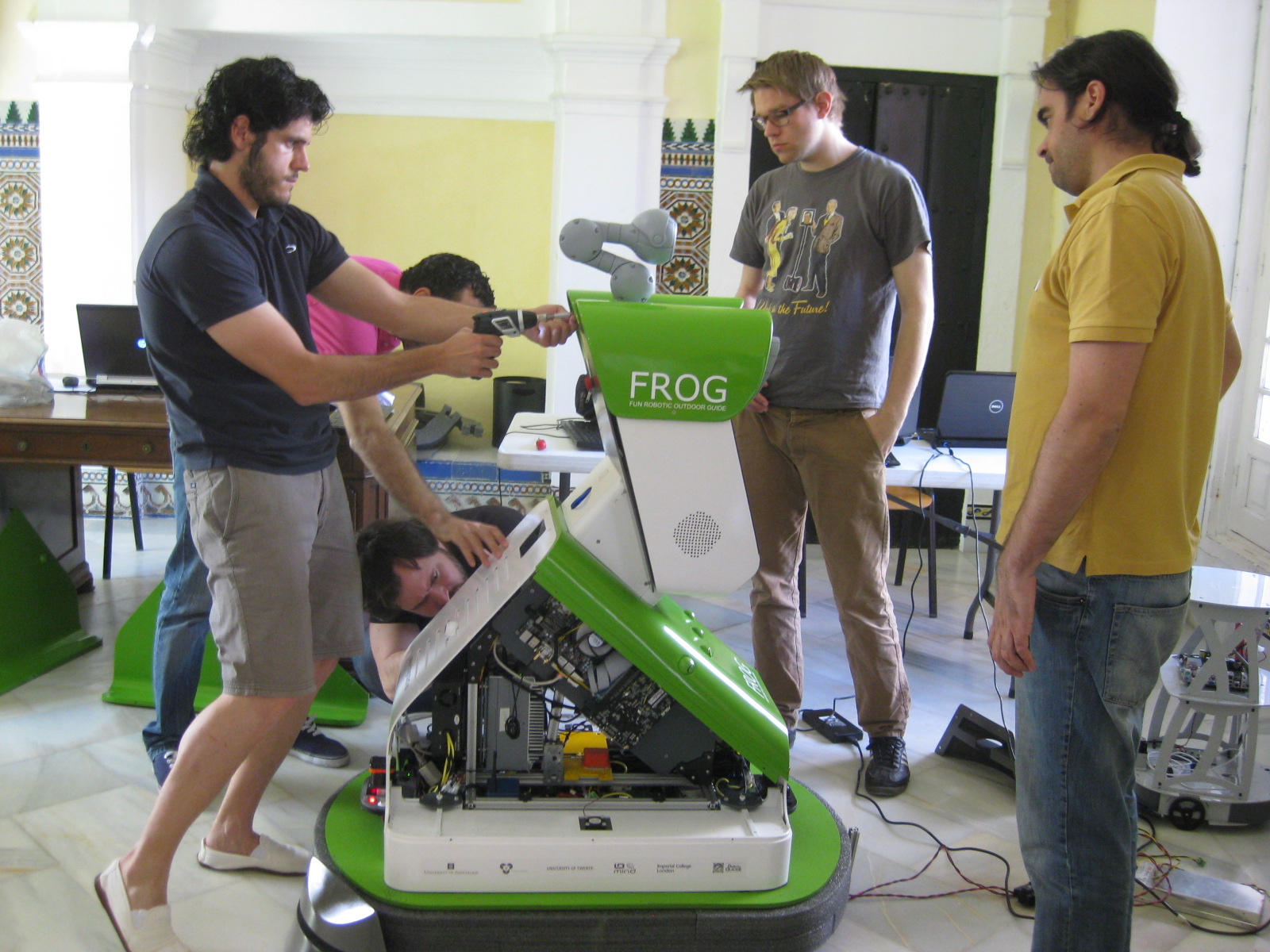
Last week the FROG robot appeared in all its glory – green at last – at the Royal Alcázar in Seville. We had a very successful integration and data collection meeting and ran user experiments and observation sessions with multimodal presentations on the robot. The aim of this project is to make a fun robot to augment the grand work done by human tour guides at heritage sites and zoos.
In September we will hold presentations and demonstrations about the project to an invited audience and we hope to have a lot of feedback from the tour guides as to how a robot could someday become their new colleague. Ask not, what can you do for the robot, but, what can the robot do for you?
FROG and baby-FROG (a customized MAGABOT platform) during a film session for Spanish television on 26 February 2014.
The report was aired for the first time on 4 March 2014 on Andalusía regional TV, Canal Surand later shown on other channels. You can find it here: FROG on TV.
What do you do when you need to run outdoor tests with a robot platform without a shell as was the case in October 2013 in the Lisbon Zoo? Well, you can either pack it in plastic sheeting fixed with sticky back plastic, or you can be a gentleman and be ready with an umbrella.
FROG’s own umbrella
A collaborative project under the FP7-ICT-2011.2.1 Cognitive Systems and Robotics (a), (d) area of activity.

 Recently Jan and Randy fitted 2 extra lasers to cover some blind spots at the sides to FROG – this meant they had to make holes in the shell (shhh ….. nobody tell Paulo!).
Recently Jan and Randy fitted 2 extra lasers to cover some blind spots at the sides to FROG – this meant they had to make holes in the shell (shhh ….. nobody tell Paulo!). The extra lasers allow protoFROG (aka the Campus Robot) to navigate better through spaces and some corners inside its new seasonal home, the DesignLab.
The extra lasers allow protoFROG (aka the Campus Robot) to navigate better through spaces and some corners inside its new seasonal home, the DesignLab.